Zusatzmasse
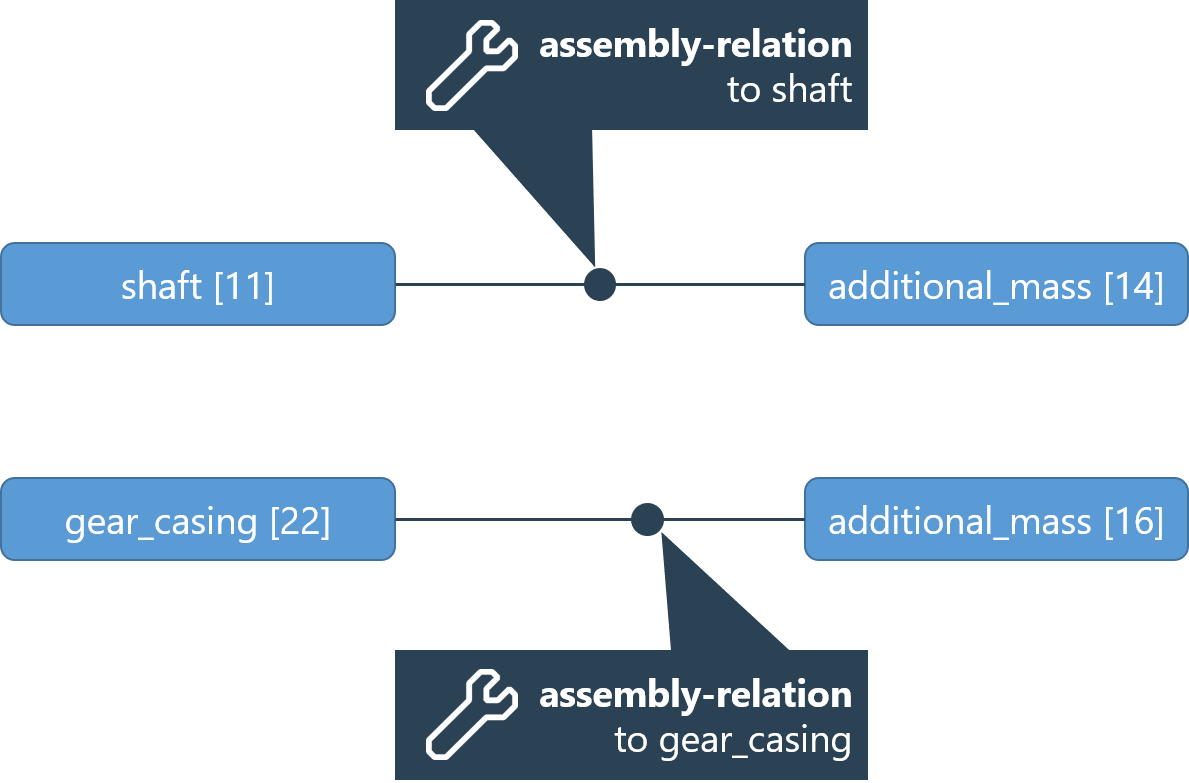
Mit der abstrakten Komponente Zusatzmasse ("additional_mass") können z.B. die Massen einer Kupplung oder eines Rotors für die Eigenfrequenzberechnungen berücksichtigt werden. Über die Gewichtskraft ist auch ein Einfluss auf die statische Berechnung des Getriebes gegeben. Eine Zusatzmasse kann mit einer Welle oder einem (FE-) Gehäuse verbunden sein. Die Zuordnung erfolgt über eine assembly-Relation.
Die Zusatzmasse verfügt über ein eigenes lokales Koordinatensystem. Dabei gibt der Koordinatenursprung (durch den "support_vector" gekennzeichnet) die Position der Krafteinleitung in die Welle/ das Gehäuse an. Die Trägheitsmomente der Komponente Zusatzmasse beziehen sich auf die Achsen des lokalen Koordinatensystems. Eine (optionale) Exzentrizität des Massenschwerpunkts kann als Position (Vektor) im lokalen Koordinatensystem angegeben werden. Für Details bitte die Beschreibung der entsprechenden Attribute in der REXS-Datenbank konsultieren.
Benötigte Komponenten | XML Syntax |
|---|---|
shaft / gear_casing | <component id="11" type="shaft"> ... </component> <component id="22" type="gear_casing"> ... </component> |
additional_mass | <component id="14" type="additional_mass"> ... </component> |
Benötigte Relationen | XML Syntax |
|---|---|
assembly | <relation id="32" type="assembly"> <ref id="11" role="assembly" hint="shaft"/> <ref id="14" role="part" hint="additional_mass"/> </relation> |
assembly | <relation id="32" type="assembly"> <ref id="22" role="assembly" hint="gear_casing"/> <ref id="16" role="part" hint="additional_mass"/> </relation> |