Lokale Koordinatensyteme für alle Komponenten
In diesem Abschnitt wird für jeden Komponententyp die Position und Orientierung des lokalen Koordinatensystems (soweit vorhanden) definiert.
Begriffsfestlegung
Begriff | Definition |
|---|---|
Endpunkt | Jede Komponente verfügt über zwei Endpunkte. Dies sind die Punkte, die bei der Projektion der Komponente auf die Wellenachse den maximalen axialen Abstand zueinander haben. Einer dieser Endpunkte wird als linker, der andere als rechter Endpunkt festgelegt. |
Gesamtbreite | Ist der axiale Abstand der beiden Endpunkte. |
Mittelpunkt | Liegt auf der Wellenachse auf halber Strecke zwischen den beiden Endpunkten. |
Mittelpunkts-Ebene | Die Ebene beinhaltet den Mittelpunkt und steht senkrecht zur Wellenachse. |
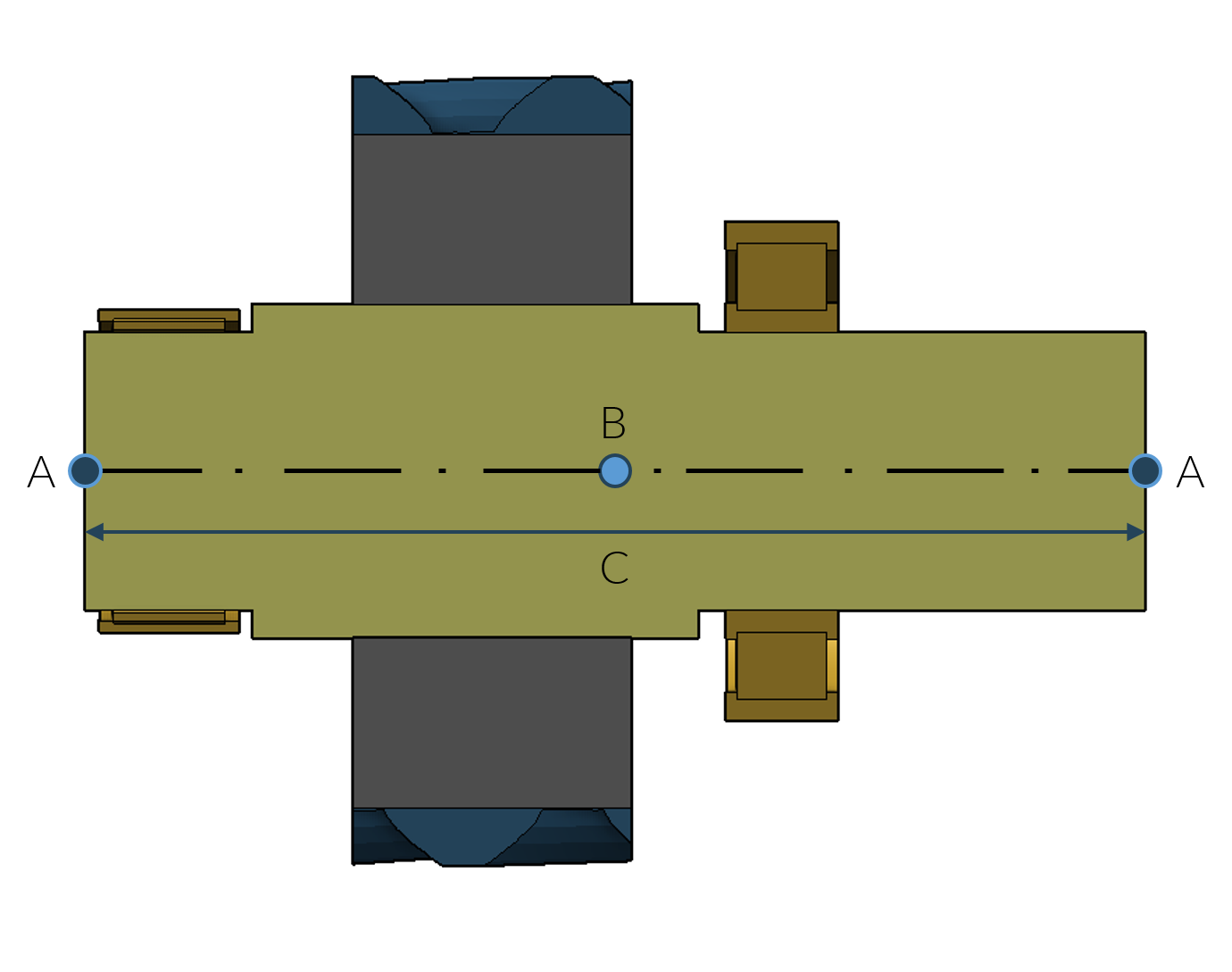
A: Endpunkte, B: Mittelpunkt, C: Gesamtbreite
Festlegung der u-Achse
Komponente | Festlegung der u-Achse |
|---|---|
Alle Komponententypen | Die u-Achse zeigt entlang der Wellenlängsachse von der linken zur rechten Seite einer Komponente. |
Festlegung der v- und w-Achse
Komponente | Festlegung der v- und w-Achse | ||||
|---|---|---|---|---|---|
shaft | Keine Vorgabe, da eine Welle i.A. rotationssymmetrisch ist. Die Wellenabschnitte, aus denen eine Welle aufgebaut ist, werden entlang der u-Achse aneinandergereiht. 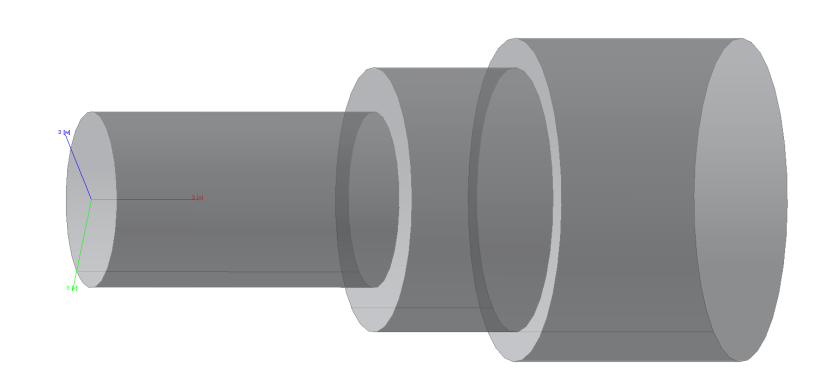 | ||||
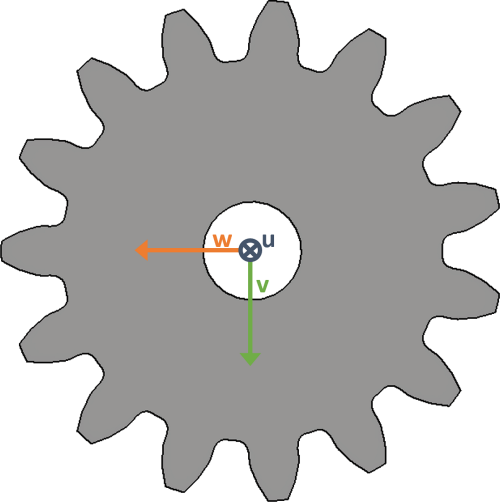
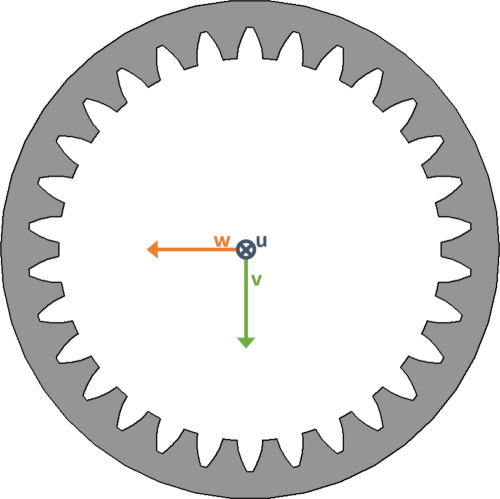
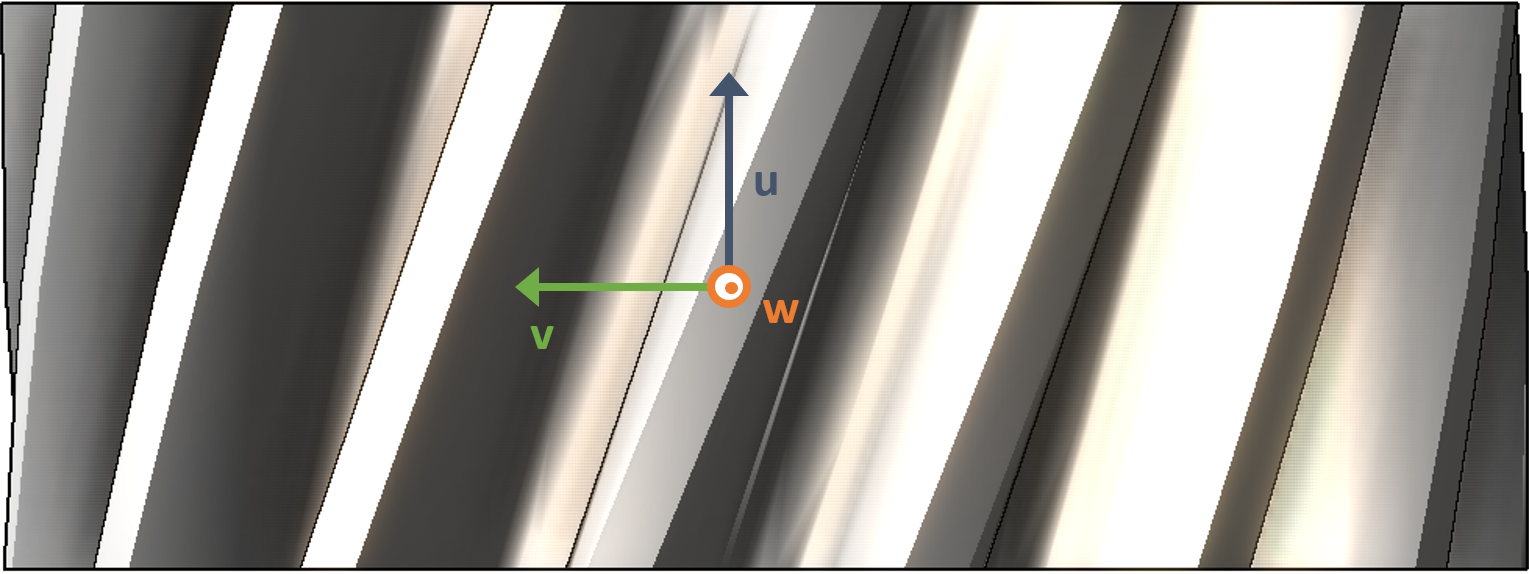
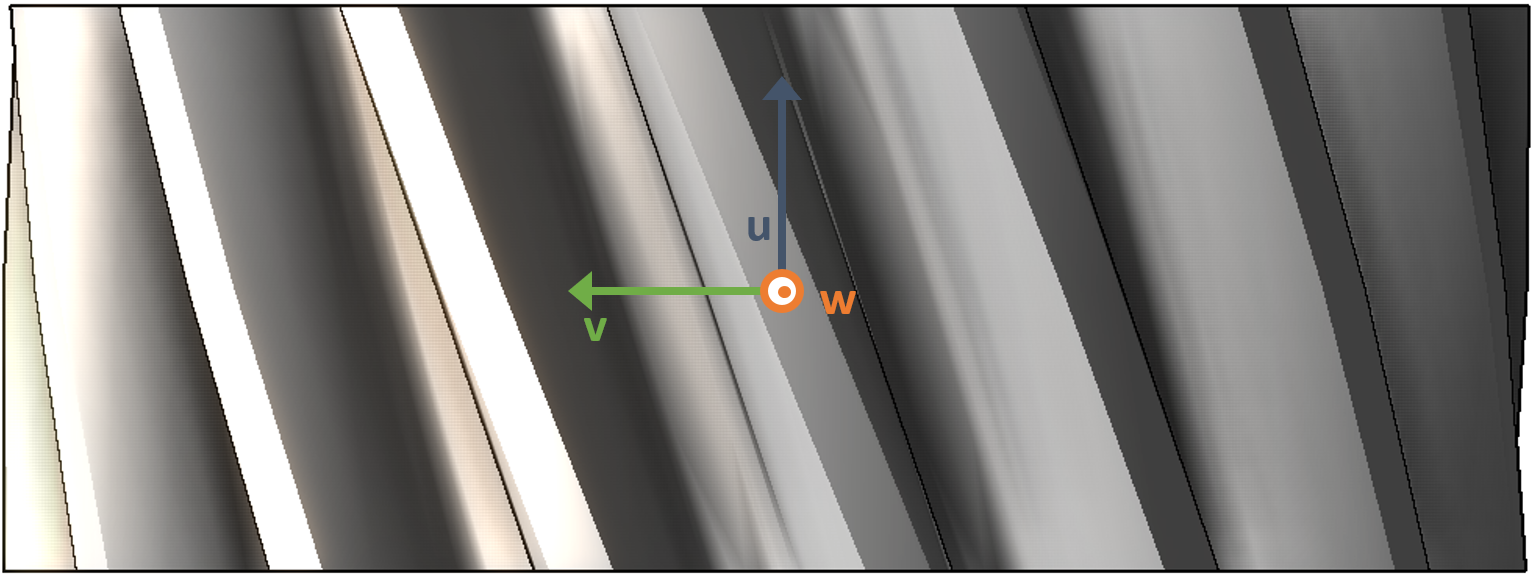
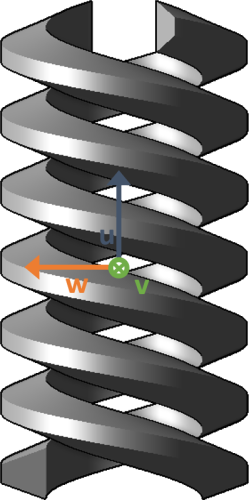
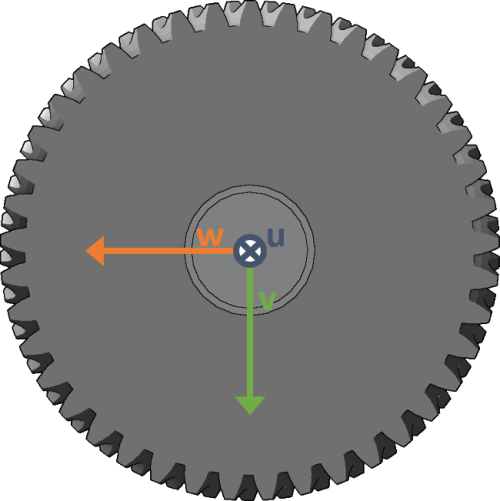
cylindrical_gear ring_gear | Die w-Achse zeigt auf den Mittelpunkt des ersten Zahns in der Mittelpunkt-Ebene. Das Attribut datum_face_orientation gibt an ob die Bezugsseite bezüglich dem lokalen Koordinatensystem des Zahnrades in positiver oder in negativer Richtung liegt.
| ||||
bevel_gear | Die w-Achse zeigt auf den Mittelpunkt des ersten Zahns in der Ebene senkrecht zur Wellenachse. Das Attribut bevel_cone_orientation gibt an ob die Kegelspitze bezüglich dem lokalen Koordinatensystem des Kegelrads in positiver oder in negativer Richtung liegt. 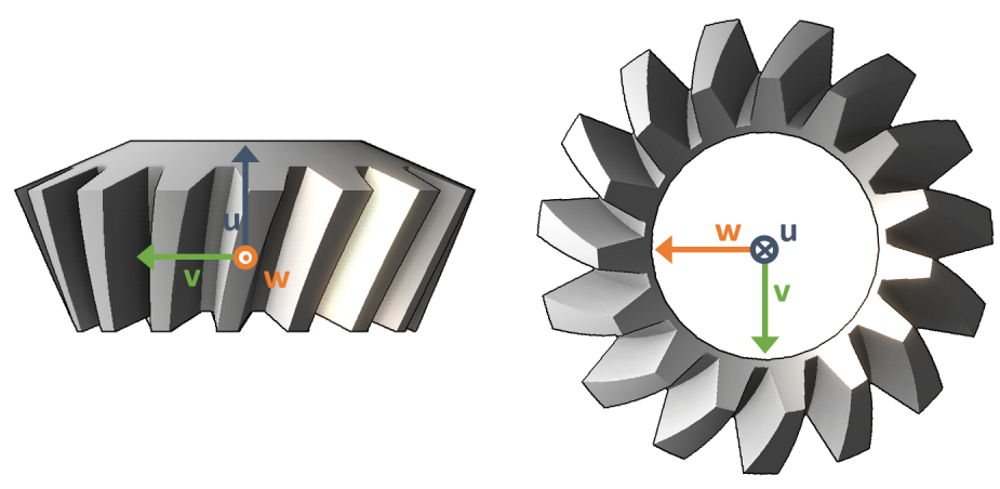 | ||||
worm_gear worm_wheel | Die w-Achse zeigt auf den Mittelpunkt des ersten Zahns in der Ebene senkrecht zur Wellenachse.
 | ||||
rolling_bearing_with_catalog_data rolling_bearing_with_detailed_data | Die Winkelposition der Wälzkörper wird über das Attribut angular_position_around_u angegeben. Der Winkel wird ab der v-Achse gezählt. Siehe auch position_of_rolling_elements. 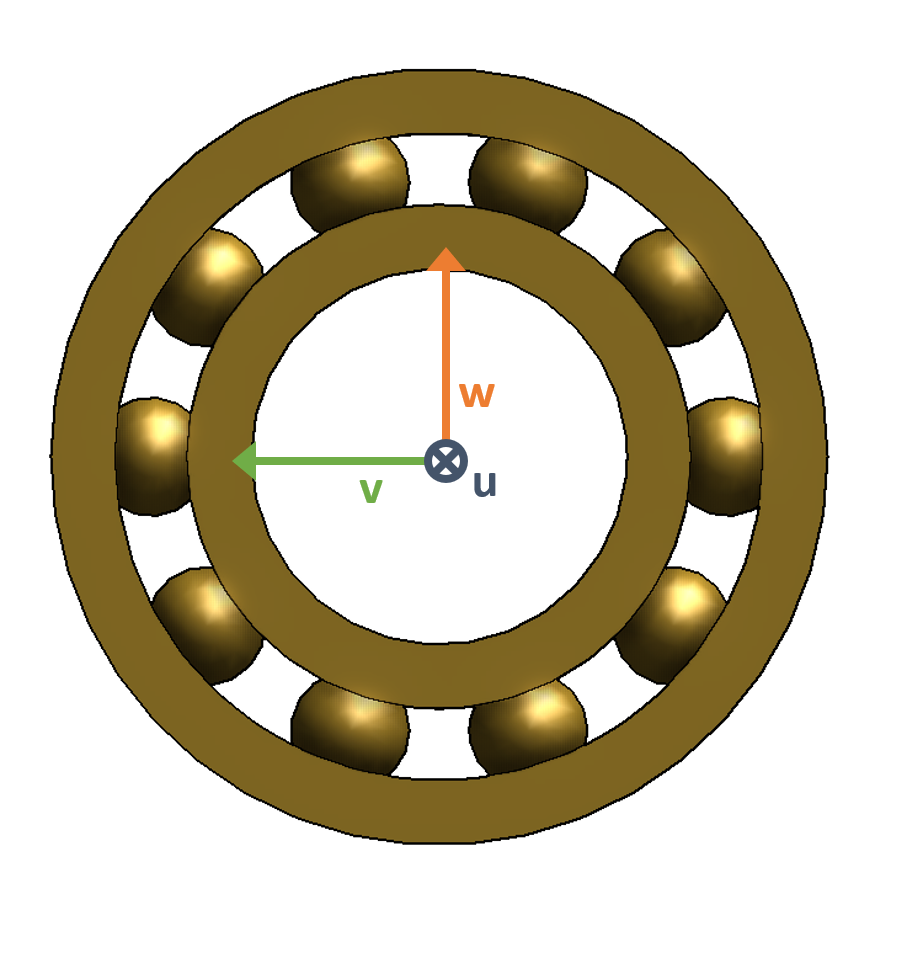 |
Position des Koordinatenursprungs
Komponente | Position des Koordinatenursprungs |
|---|---|
shaft side_plate | Der Ursprung des lokalen Koordinatensystems liegt im linken Endpunkt. |
bevel_gear | Der Ursprung des lokalen Koordinatensystem entspricht der Projektion des Auslegungspunktes P auf die Radachse. Bei Kegelradstufen ohne Achsversatz liegt der Auslegungspunkt auf Höhe der halben Verzahnungsbreite (ISO 23509 2006 A.3). Bei Hypoiden gibt es verschiedene Methoden für die Wahl des Auslegungspunkts, die Position des Auslegungspunktes kann dabei von der Mitte der Zahnbreite abweichen, siehe ISO 23509 2006 A.3 für Details. Abweichungen von der Zahnmitte ergeben sich für beide Zahnräder bei Verwendung der Methode 1 (Gleason), sowie für das Ritzel bei der Verwendung von Methode 3 (Klingelnberg). |
Alle anderen Komponententypen | Der Ursprung des lokalen Koordinatensystems liegt im Mittelpunkt der Komponente. |